 استرجاع مجاني وسهل
استرجاع مجاني وسهل أفضل العروض
أفضل العروض

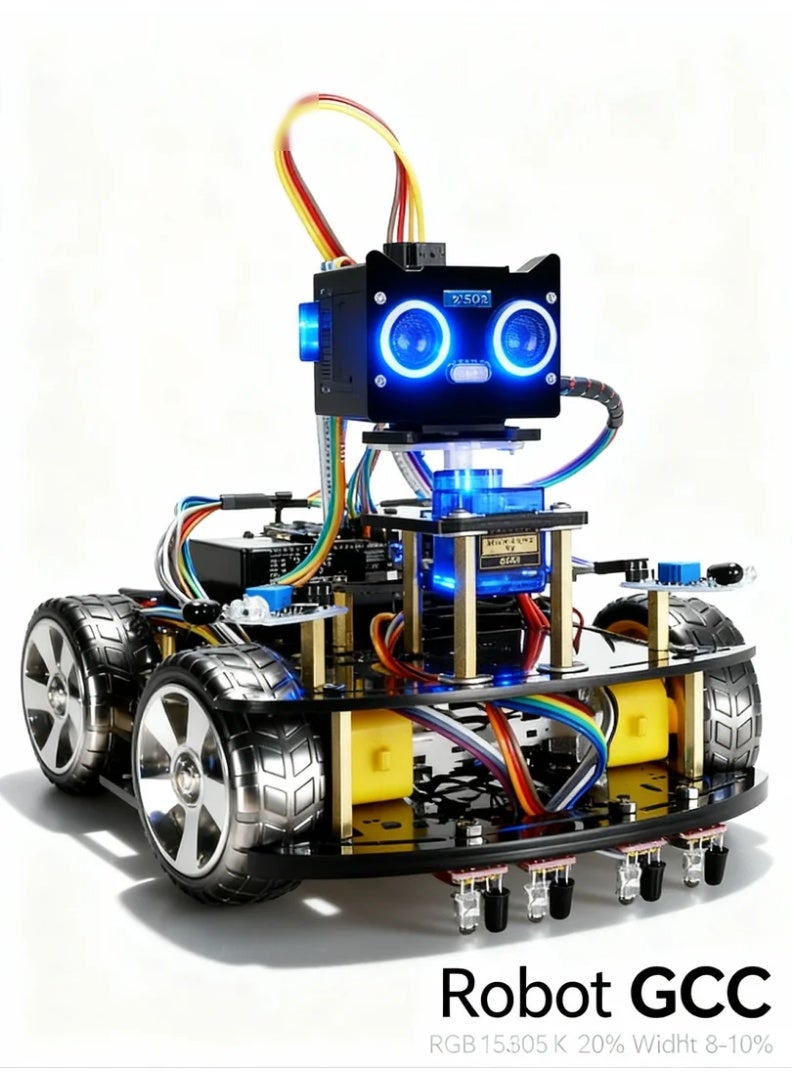
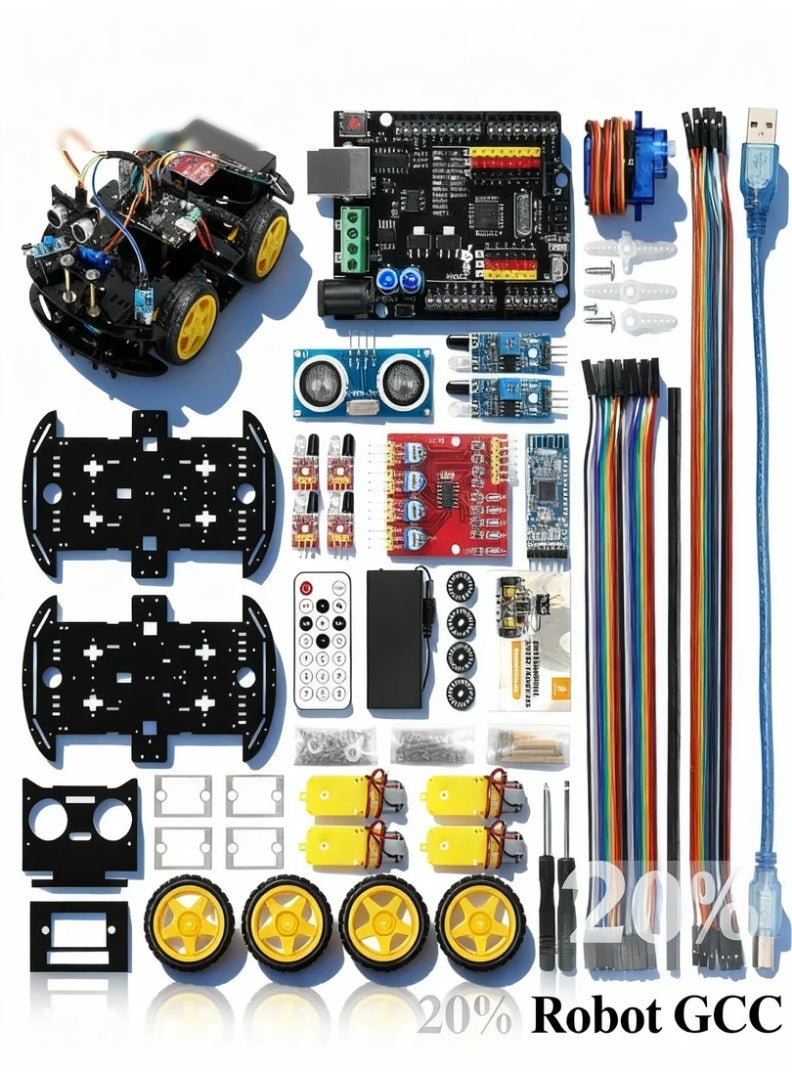


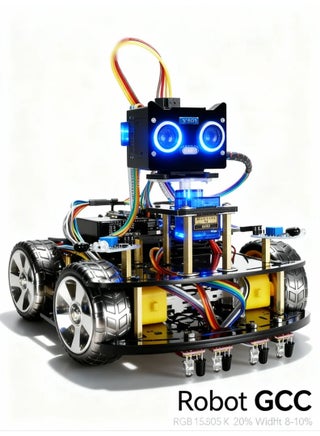
تُعد سيارة الروبوت التعليمية الذكية منصة متكاملة لتعلم علوم STEM بطريقة عملية تجمع بين الميكانيكا، وأجهزة الاستشعار، والبرمجة، والذكاء الاصطناعي.
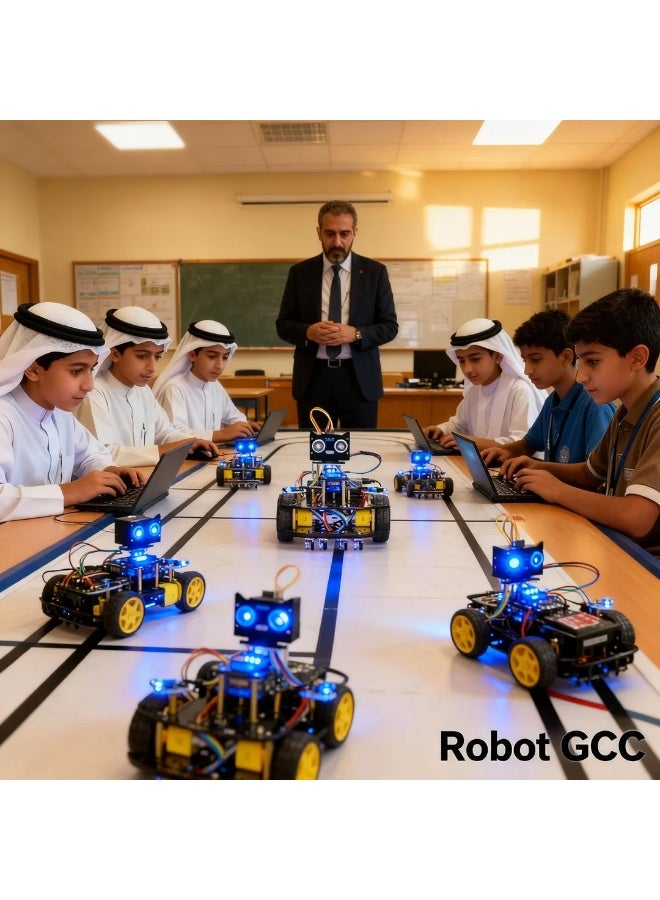
يتعلم الطلاب من خلال التجميع والتوصيل والبرمجة والتجريب، مما يمنحهم فهماً حقيقياً لكيفية عمل الأنظمة الروبوتية الحديثة في العالم الواقعي.
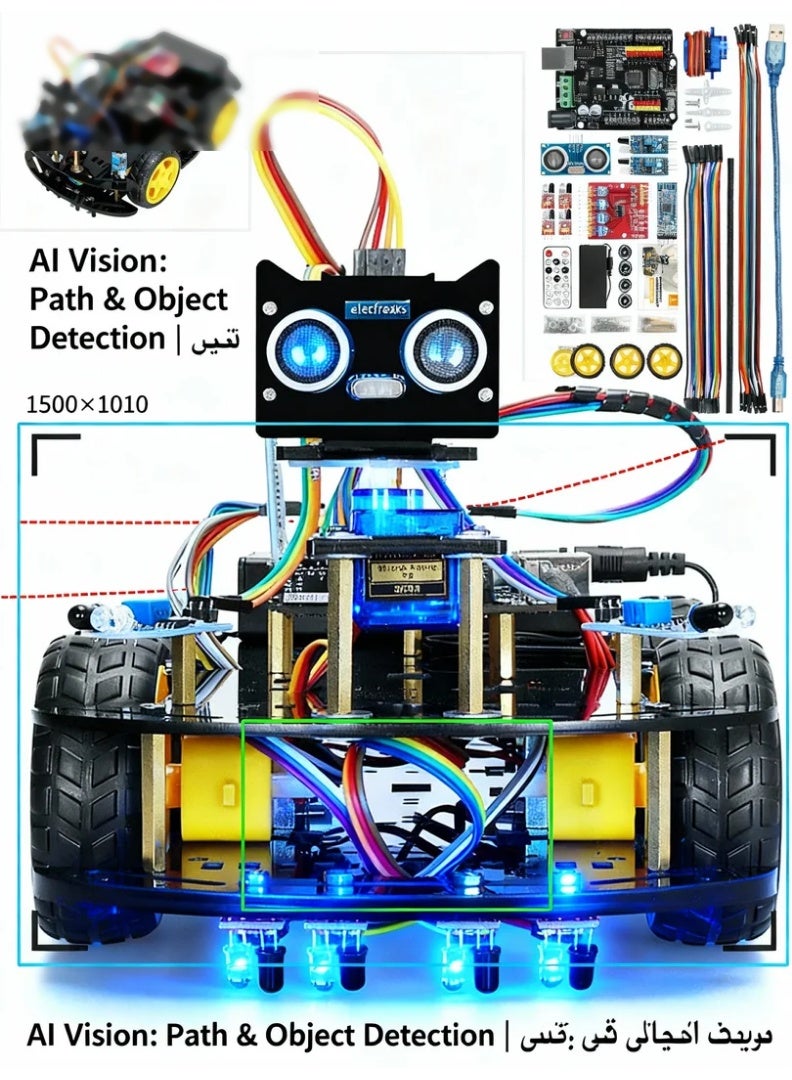
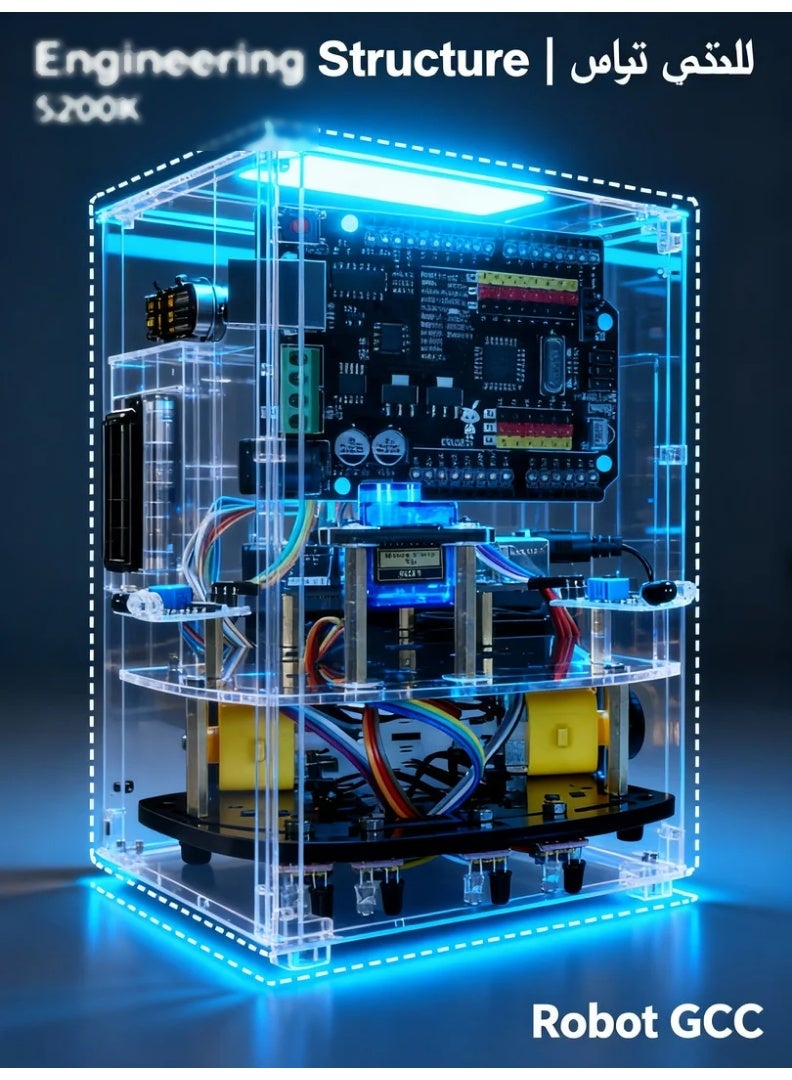
تم بناء النظام على بيئة Arduino مفتوحة المصدر، ويدعم مجموعة متنوعة من الحساسات الذكية مثل الموجات فوق الصوتية لتجنب العوائق، وتتبع الخط بالأشعة تحت الحمراء، والتحكم عبر البلوتوث، ومستشعر التوازن الجيروسكوبي.
يمكن للطلاب استخدام برمجة البلوكات المرئية (Blockly) أو Arduino IDE لكتابة الأكواد وإنشاء خوارزميات منطقية تمكّن الروبوت من التنقل الذاتي وتجنّب العوائق والاستجابة للبيئة المحيطة.
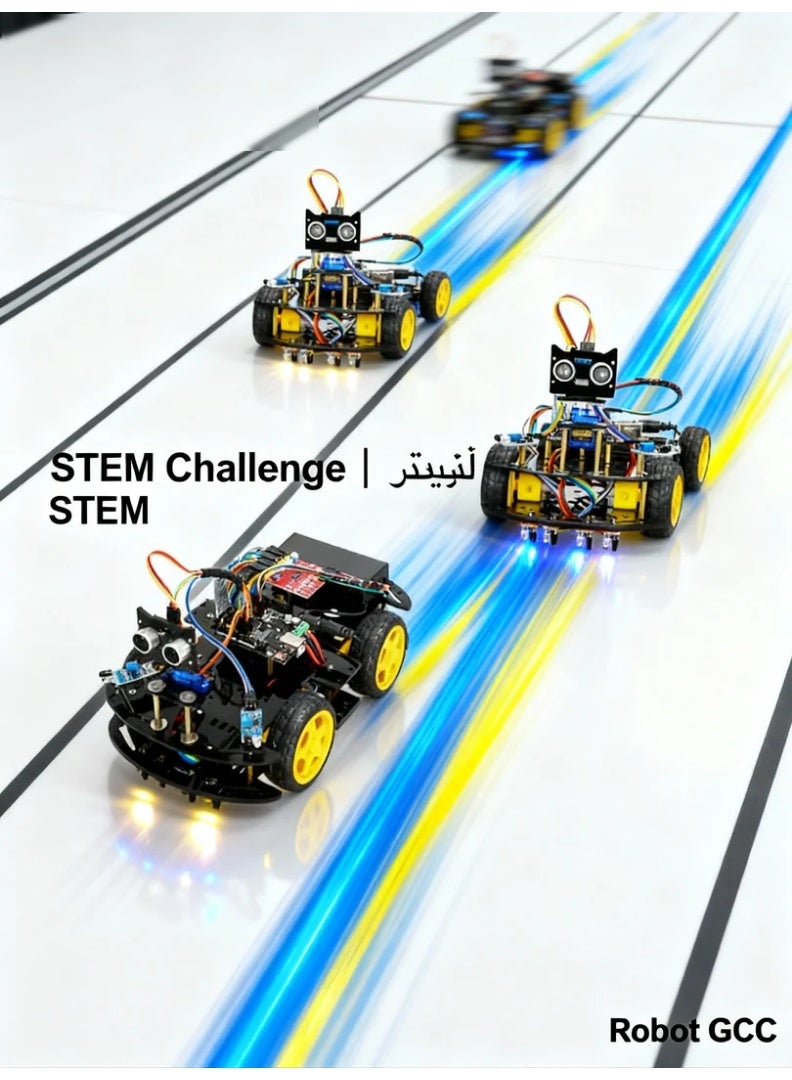
تم تصميم النظام الهيكلي باستخدام عجلات ميكانوم متعددة الاتجاهات، مما يسمح بالحركة الكاملة إلى الأمام، الخلف، الجانبين، والدوران في مكانه، لتوضيح مفاهيم الفيزياء والحركيات المتجهة.
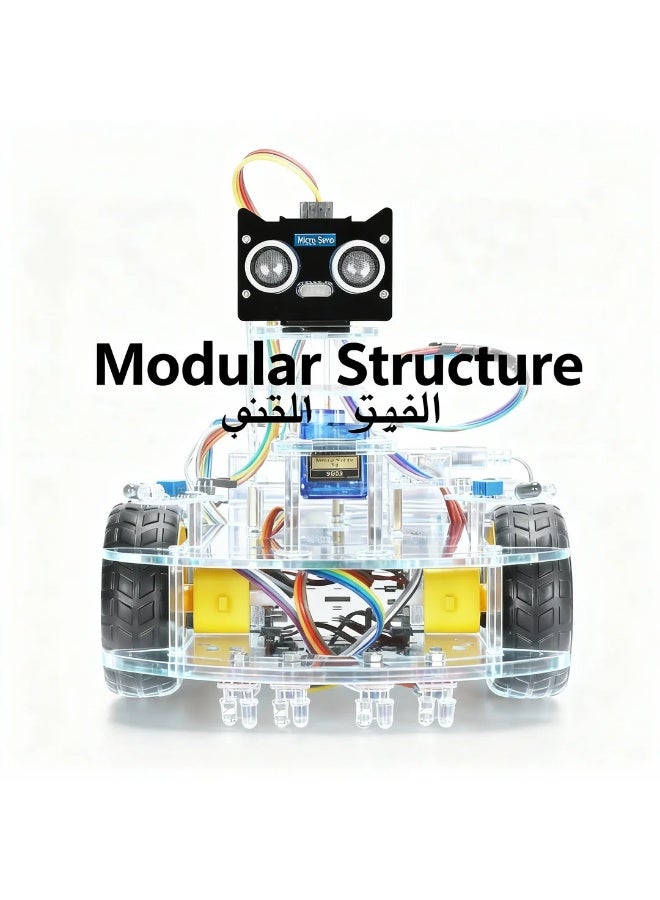
تجعل الوصلات المعيارية Plug-and-Play التوسعة والصيانة سهلة دون الحاجة للحام، مما يجعله مثالياً للفصول الدراسية والمختبرات المنزلية ومراكز الابتكار.
تتكون المكونات من سبائك الألومنيوم والبلاستيك الآمن بيئياً ABS، مما يوفر متانة ممتازة للاستخدام المتكرر في الدروس أو المسابقات.
تأتي المجموعة مع دليل تعليمي كامل وأمثلة برمجية مفتوحة المصدر تسهّل على المبتدئين تعلم البرمجة وعلى المعلمين تنظيم التجارب بسهولة.
إنها ليست مجرد سيارة، بل منصة تعليمية متقدمة لتعلم البرمجة والذكاء الاصطناعي — مصممة لإلهام الإبداع، وتعزيز التفكير العلمي، وبناء مهارات المستقبل.






![/electronics-and-mobiles/mobiles-and-accessories/mobiles-20905/smartphones/honor/?sort[by]=best_rating&sort[dir]=desc&limit=50&page=1&isCarouselView=false](https://a.nooncdn.com/cms/pages/20250811/honor/en_uae_dk-nav-01.png)




![/fashion-men/jack_jones/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240305/4ef48af441e2b44cea1673cd2e4aff67/en_dk-men-brands-04.png)


![/fashion-men/seventy_five/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240305/4ef48af441e2b44cea1673cd2e4aff67/en_dk-womens-new-brands-01.png)
![/fashion-men/skechers/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240305/4ef48af441e2b44cea1673cd2e4aff67/en_dk-womens-new-brands-02.png)



![/fashion-women/mango/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240305/4ef48af441e2b44cea1673cd2e4aff67/en_dk-women-brands-05.png)
![/fashion-women/guess/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240305/4ef48af441e2b44cea1673cd2e4aff67/en_dk-women-brands-09.png)


![/fashion-women/ella/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20241812/en_dk-nav-brands-01.png)
![/fashion-women/skechers/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20241812/en_dk-nav-brands-02.png)



![/fashion/view-all-kids-clothing/nike/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240911/nav-web/en_mb_uae_brand-01.png)
![/fashion/view-all-kids-clothing/disney/disney_minnie_mouse/disney_frozen/disney_princess/disney_mickey_mouse/disney_baby/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240911/nav-web/en_mb_uae_brand-03.png)




![/fashion/view-all-kids-clothing/new_balance/?sort[by]=popularity&sort[dir]=desc&limit=50](https://a.nooncdn.com/cms/pages/20240911/nav-web/en_mb_uae_brand-11.png)




















































































![/music-movies-and-tv-shows/musical-instruments-24670/pianos-keyboards-synthesizers/chloris/?sort[by]=popularity&sort[dir]=desc&limit=50&page=1&isCarouselView=false](https://f.nooncdn.com/cms/pages/20250407/books-nav/en_uae_dk-nav-brands-04.png)
![/music-movies-and-tv-shows/musical-instruments-24670/pianos-keyboards-synthesizers/roland/?sort[by]=popularity&sort[dir]=desc&limit=50&page=1&isCarouselView=false](https://f.nooncdn.com/cms/pages/20250407/books-nav/en_uae_dk-nav-brands-05.png)
![/music-movies-and-tv-shows/musical-instruments-24670/pianos-keyboards-synthesizers/donner/?sort[by]=popularity&sort[dir]=desc&limit=50&page=1&isCarouselView=false](https://f.nooncdn.com/cms/pages/20250407/books-nav/en_uae_dk-nav-brands-06.png)
![/music-movies-and-tv-shows/musical-instruments-24670/pianos-keyboards-synthesizers/korg/?sort[by]=popularity&sort[dir]=desc&limit=50&page=1&isCarouselView=false](https://f.nooncdn.com/cms/pages/20250407/books-nav/en_uae_dk-nav-brands-07.png)


